Als I-Regler bezeichne ich einen Regler ... , welcher ein Intergral berücksichtigt, das sich aus den Differenzen e von t=0 bis t=n berechnet.
Beispiel:
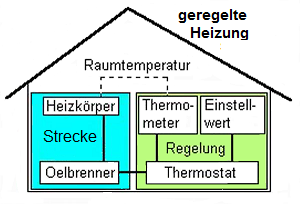
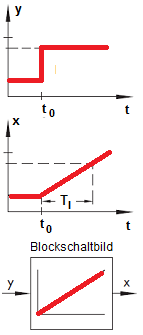
Die Eingangsfunktion ist eine Beschleunigung eines Fahrzeuges, das heisst, dass dessen Geschwindigkeit im Laufe der Zeit zunimmt. Zu jedem Zeitunkt hat die Geschwindigkeit einen bestimmten Wert. Die Werte werden aufaddiert und aus dem Resultat wird die Stellgrösse y berechnet.
Eine Zeitreihe kann sein t1=1, t2=2, t3=3 ..
zum Zeitpunkt t5 ist dann der aufaddierte Wert 1+2+3+4+5 = 14.
14 wird mit Ki multipliziert was den Stellwert y zum Zeitpunkt t5 ergibt.
Der i-Regler wird nur in Kombination verwendet, weil er sehr langsam ist und alleine das Ziel nicht immer erreicht.
Der PID-Regler ist einfach die Summe, oft genügt ein einfacherer Reger